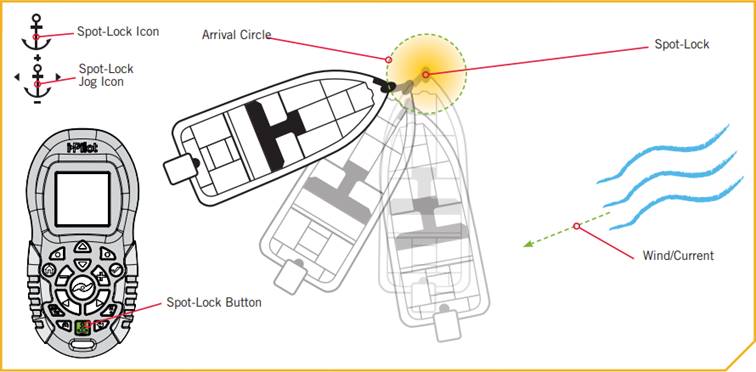
Spot-Lock utilise un point de référence unique, enregistré lors de l'appui sur le bouton Spot-Lock.
Ce point de référence correspond aux coordonnées GPS de la position du moteur au moment de l'appui. Il est enregistré et peut être sauvegardé dans l'une des mémoires de Spot-Lock.
Spot-Lock fonctionne en créant un cercle d'arrivée autour du point de référence, vers lequel le moteur se dirige automatiquement et qu'il tente de maintenir.
Spot-Lock maintient le moteur dans ce cercle.
Si i-Pilot ou i-Pilot Link détecte que le moteur se trouve dans le cercle d'arrivée, sa vitesse est ramenée à zéro.
Si i-Pilot ou i-Pilot Link détecte que le moteur est hors du cercle, il contrôle sa vitesse et sa direction afin de ramener le bateau dans le cercle d'arrivée.
Variables affectant la précision et la réactivité
La précision et la réactivité avec lesquelles l'i-Pilot contrôle votre bateau dépendent fortement de nombreuses variables, notamment :
- Rapport entre la poussée du moteur et le poids du bateau.
Sur un petit bateau, une poussée excessive peut entraîner une surcorrection du système i-Pilot. Sur un grand bateau, une poussée insuffisante peut ralentir la réponse du système i-Pilot. - Vent.
Un vent et/ou un courant excessifs peuvent réduire la précision de positionnement de l'i-Pilot. - Puissance du signal GPS.
Plus le nombre de barres de signal GPS est élevé, plus la précision est grande. Lorsque la tension au niveau du moteur diminue, le GPS devient moins précis, voire perd complètement le signal.
Précision attendue pour le verrouillage ponctuel
La précision attendue de Spot-Lock dépend de la version d'i-Pilot ou d'i-Pilot Link dont vous disposez.
- Pour les systèmes Legacy i-Pilot et Legacy i-Pilot Link (2007-2016), la précision attendue est de 10 à 15 pieds.
- Bluetooth i-Pilot et Bluetooth i-Pilot Link (2017-actuel), la précision attendue est de 1,5 mètre.
Dépannage de votre système i-Pilot/i-Pilot Link
- Testez la batterie en charge et vérifiez toutes les connexions.
Une chute de tension au niveau du moteur entraînera des informations GPS inexactes et une direction erratique. - Vérifiez la qualité du signal GPS.
L'indicateur de puissance du signal GPS sur la télécommande i-Pilot/i-Pilot Link doit afficher au moins une barre. - Ajustez l'échelle du bateau sur la télécommande i-Pilot/i-Pilot Link (disponible uniquement sur les modèles Bluetooth i-Pilot et Bluetooth i-Pilot Link (2017 à aujourd'hui)).
Pour une installation optimale d'un moteur de pêche à la traîne, la poussée doit être adaptée à la taille du bateau. Un déséquilibre entre la poussée du moteur et la taille du bateau peut entraîner un dépassement de la position Spot-Lock. - Éloignez tous les objets métalliques ferreux du contrôleur i-Pilot (tête supérieure).
Cela inclut les ancrages, les structures métalliques, etc., qui peuvent provoquer des interférences. - Interférences du capteur de cap :
Le capteur de cap doit être installé dans un endroit à l'abri des interférences magnétiques. Assurez-vous qu'il soit monté à au moins 60 cm (24 pouces) de tout matériau magnétique ou ferreux, ou de tout objet susceptible de générer des interférences magnétiques. Cela inclut : la base du moteur électrique, les ancres, les rambardes métalliques, les haut-parleurs, les radios et les câbles de la batterie du moteur électrique. Il doit être monté sur une surface plane et horizontale, la flèche du capteur de cap étant parallèle à la quille du bateau. Il doit également avoir une vue dégagée sur le moteur électrique. - Nettoyez les débris derrière l'hélice.
Vérifiez la présence d'algues, de lignes de pêche ou d'autres débris derrière l'hélice qui pourraient entraver son mouvement.
Cet article a-t-il été utile ?
C'est super !
Merci pour votre commentaire
Désolé ! Nous n'avons pas pu vous être utile
Merci pour votre commentaire
Commentaires envoyés
Nous apprécions vos efforts et nous allons corriger l'article